ICRA2010: Optimal feedback control for anthropomorphic manipulators NAIST Robot Learning Lab 1:40 1 year ago 158 Скачать Далее
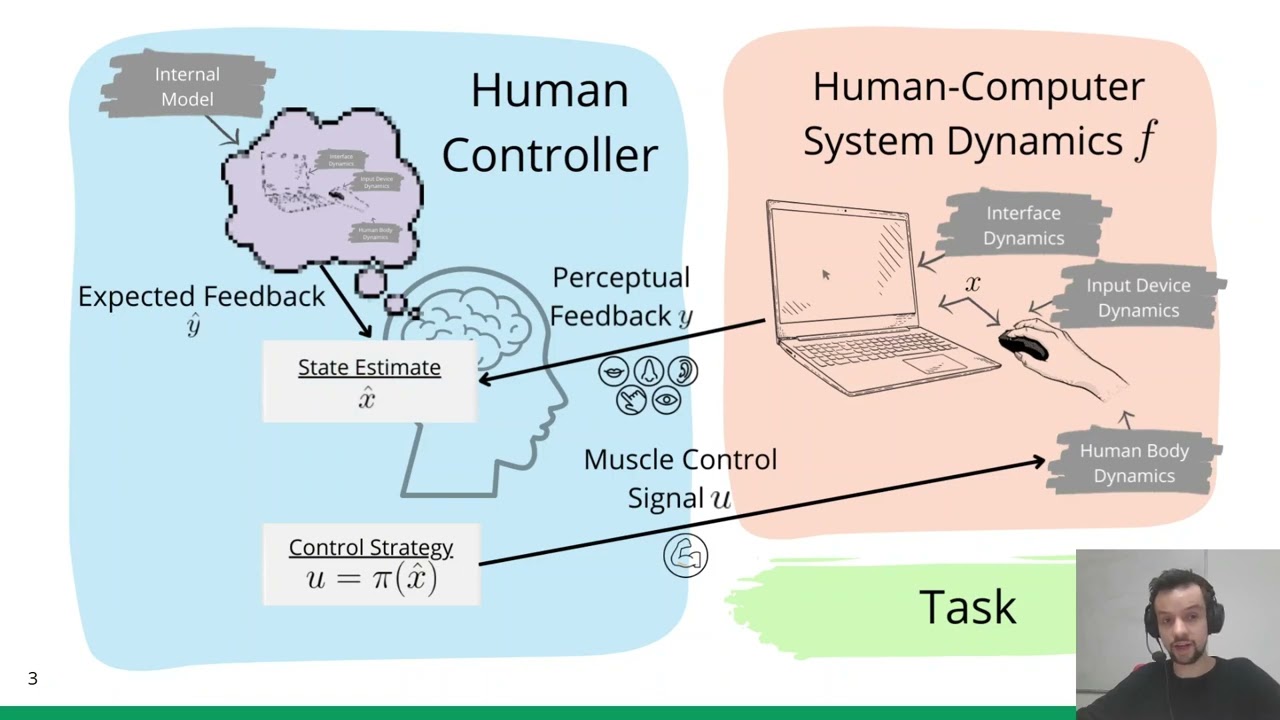
Optimal Feedback Control for Modeling Human-Computer Interaction ACM SIGCHI 8:23 1 year ago 227 Скачать Далее
2019 Dynamic locomotion synchronization of bipedal robot and human operator via bilateral feedb... 2 Biomechatronics and Intelligent Robotics Lab 1:02 3 years ago 47 552 Скачать Далее
Motion Capture State Feedback for Real-Time Control of a Humanoid Robot German Research Center for Artificial Intelligence 2:40 1 year ago 808 Скачать Далее
Talk: Human control of complex objects: Stochastic optimal feedback control and beyond Neuromatch Conference 16:38 3 years ago 83 Скачать Далее
This Robot Looks Way Too Human | Human-robot Interaction | Humanoid Robot, Ameca Mecharithm - Robotics and Mechatronics 0:21 2 years ago 13 212 Скачать Далее
Day5 Start Creating Robots v3 Setting up an environment Become A Roboticist 6:02 5 hours ago No Скачать Далее
The Next Generation Of Digit - Enabling Humans To Be More Human Agility Robotics 1:38 1 year ago 544 541 Скачать Далее
1 1 2 Lecture Video 1 of 2 Standard Manipulator Types Angela Sodemann 15:20 8 years ago 3 176 Скачать Далее
Human-Robot Interaction: Non-Verbal Communication Agility Robotics 1:23 1 year ago 9 900 Скачать Далее
ICRA 2022 Presentation: "Whole-Body Control of Series-Parallel Hybrid Robots" German Research Center for Artificial Intelligence 3:39 1 year ago 528 Скачать Далее
Design and Control of a Miniature Bipedal Robot with Proprioceptive Actuation for Dynamic Behaviors RoMeLa 2:34 1 year ago 58 930 Скачать Далее
Controlling Apptronik's Biped Robot DRACO UT Human Centered Robotics Lab 0:42 5 years ago 25 738 Скачать Далее